Med samim poletom bomo spremljali več parametrov, ki jih bomo v različnih intervalih beležili na pomnilniško kartico microSD. Izbrane parametre (npr. koordinate GPS) pa bomo v realnem času pošiljali preko radijske zveze na zemljo.
Za zajem podatkov iz množice tipal in naprav v sistemu smo uporabili več različnih komunikacijskih vmesnikov (I2C , SPI, UART in USB) ter neposredno povezavo na analogni-digitalni pretvornik vgrajen v samem mikrokrmilniku.
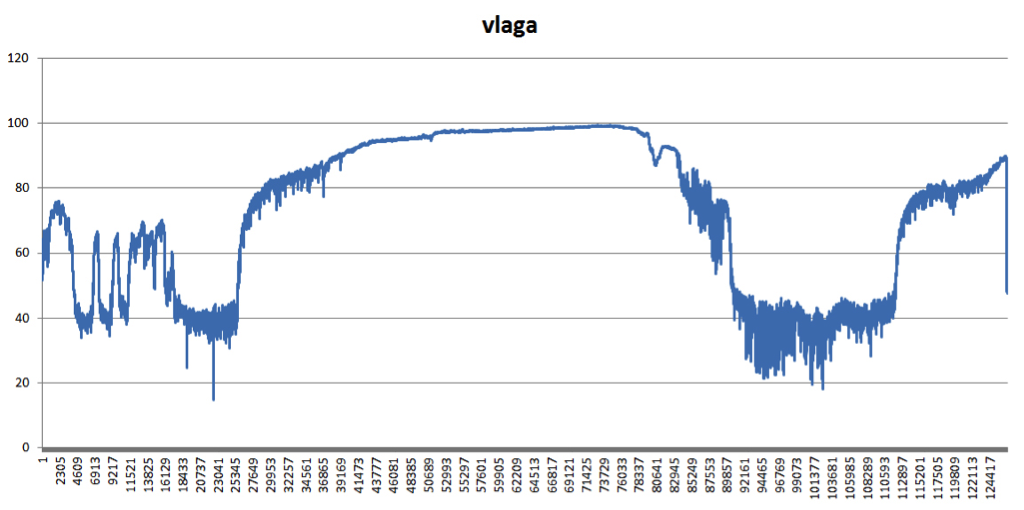
Preko prvega vodila I2C (/dev/i2c-0) smo povezali: tipalo za vlago in temperaturo (SHT21), tipalo za svetlobo (ADJD-S311), tipalo za zračni tlak (MS5611), tipalo za pospešek (MPU-6050) ter kompas (HMC5883).
Na vodilu SPI smo preko 24-bitnega analogno-digitalnega pretvornika (AD7793) v sistem povezali uporovni termometer PT100 slovenske proizvodnje, ki nam bo omogočal merjenje z ločljivostjo 0,01 in natančnostjo 0,1 stopinje Celzija.
S pomočjo analogno-digitalnega pretvornika vgrajenega v mikrokrmilniški modul AriaG25 bomo spremljali napetost na obeh LiPo baterijah (skupna kapaciteta 6000mAh), svetlobo v UV delu spektra (dioda SG01S SGLux) ter radioaktivnost (energijo beta in gama žarkov s pomočjo fotodiod BPW34).
Preko prvega vmesnika UART nam bo sprejemnik GPS (senzor u-Blox MAX-6) posredoval trenutno lokacijo, nadmorsko višino, točno uro in hitrost. Drugi vmesnik UART bomo uporabili za pošiljanje paketov s podatki iz balona po protokolu AX.25 v sistem APRS, kar nam bo omogočalo, da bomo preko radijske povezave spremljali, kaj se dogaja z balonom. Radijski signal bomo pošiljali s pomočjo radijskega modula Radiometrix HX-1, ustrezen signal za radijski modul pa bomo tvorili s pomočjo 12-bitnega digitalno-analognega pretvornika.
Na USB vodilo bo priključena spletna kamera Logitech C270, s pomočjo katere bomo spremljali stanje balona. Z malo sreče bomo ulovili tudi trenutek, ko bo balon počil in se bo začelo spuščanje proti zemlji.
Za snemanje poleta s pogledom na Zemljo imamo dodatno kamero z lastno mikroSD (uSD) pomnilniško kartico. Kamero bomo z mikrokrmilnikom le krmilili (vklop/izklop) in mikrokrmilnika ne bo obremenjevala. Živa slika se bo shranjevala na uSD kartico vgrajeno v kameri, snemali pa bomo z ločljivostjo 1080p in s hitrostjo 30 slik na sekundo.